
Plusieurs possibilités pour la motorisation, je les liste toutes avec les avantages/inconvénients, et détails du montage que je réalise.
Les options possible
Motorisation avant :
Le plus courant en drift trike électrique, c’est de mettre une roue avant avec un moteur intégré dans le moyeu. J’aime bien l’idée parce que c’est optimisé niveau encombrement, le moteur est dans la roue, ça fait ça en moins à loger sur le trike et surtout c’est le plus facile à adapter. Mais du coup c’est une « traction », ça revient à mettre des plateaux sous les roues arrière d’une voiture traction et « drifter » sur un parking avec.
L’avantage c’est qu’il y a moins de problèmes de motricité vu que la roue motrice a un vrai pneu. Le comportement est le même qu’avec un trike non motorisé, ça déleste juste de devoir pédaler.
Donc j’ai pas retenu cette solution parce que c’est pas assez fidèle au comportement d’une vraie drifteuse.
Motorisation arrière :
Plus fidèle au drift, avoir les roues arrière motrice. Plusieurs possibilités de le faire, à commencer par un/des moteur(s) indirect via une distribution.
Exemple ici avec un trike FIIK Drifter à un moteur par roue relié par des chaines de distribution. J’aime beaucoup l’idée, c’est symétrique etc, mais c’est compliqué à réaliser.

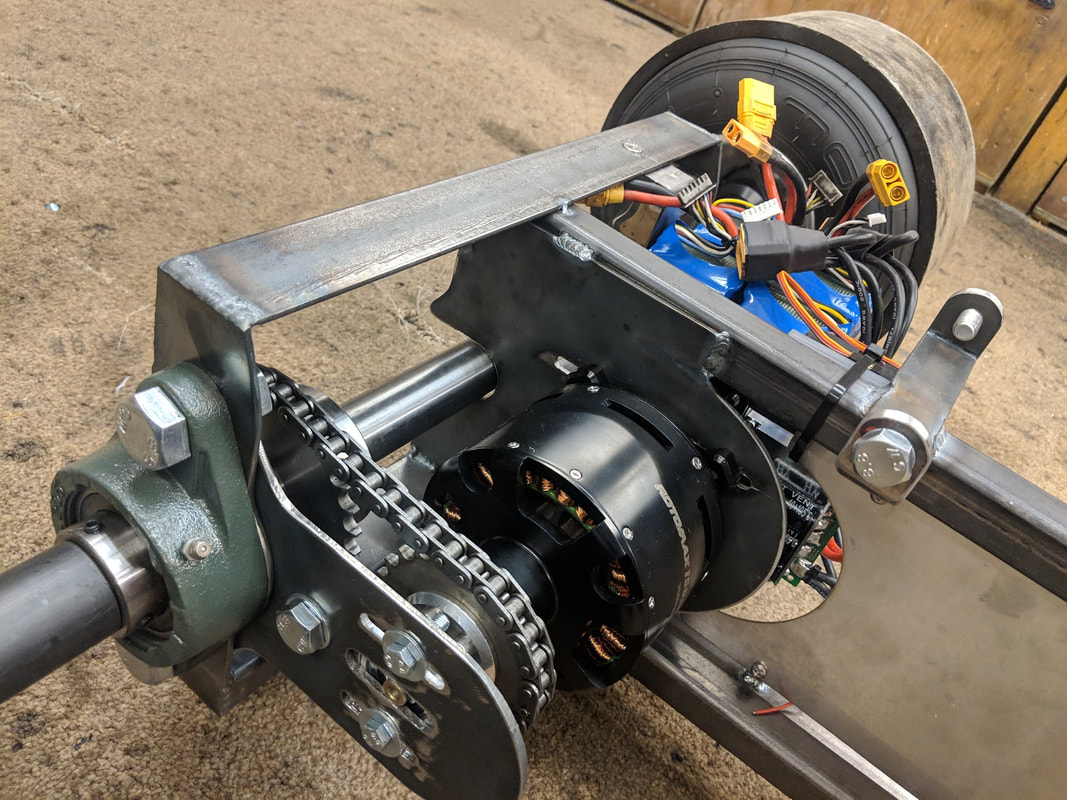
Autre exemple plus courant avec celui de Colin Furze, un seul moteur pour les 2 roues via une chaîne et un arbre de type kart/quad. L’avantage c’est qu’on est moins limité en terme de taille de moteur, mais c’est très volumineux comme montage ! Et le siège doit être rehaussé pour loger tout l’électronique en dessous.
Il est notamment possible d’utiliser un alternateur modifié en moteur pour réduire le coût du trike.

Dernière option, devenue possible avec la popularité des trottinettes, overboard, etc… électriques, des moteurs intégrés dans les roues. On retrouve le même avantage que pour la roue avant à moteur, l’encombrement est optimisé. En terme de puissance, on trouve des roues à moteur de petite taille suffisamment puissantes pour l’utilisation du trike. C’est cette option que j’ai choisi.

Mon choix
Pas mal de choix de modèles de roues à moteur, mais pour un trike de drift il faut des roues avec un diamètre maxi d’environ 250mm pneu inclus pour que les bandes plastique passent par dessus et soient maintenues, et la largeur importe aussi pour avoir une portée suffisamment avec les bandes plastique, et là le choix se réduit énormément !
Les roues à moteur que j’ai pris sont des 10″ 48V 500W.

C’est les seules que j’ai trouvé avec des dimensions (diamètre/largeur) se rapprochant bien des roues actuelles de kart avec moyeu simple (que d’un côté).

La taille des pneus est de 10×4-6, malheureusement c’est pas une taille courante comme les pneus de kart donc il est assez difficile (=cher) de trouver des pneus de rechange pour se permettre de drifter sur le mouillé sans bandes plastique (à tester…).

Le pneu est sans chambre à air, et l’ensemble garde assez bien la pression, contrairement aux roues de kart qui tenaient pas plus de 24h !
L’axe de la roue qui sert de fixation et ou le faisceau passe à travers.
L’écrou et les rondelles, dont une des 2 sert pour le blocage radial de l’axe (anti-couple).
Le faisceau du moteur, à droite les 3 phases et à gauche les différents capteurs (température, vitesse de rotation, position…). J’ai de gros doutes sur la section des fils de phase, qui me paraissent largement sous-dimensionnés pour l’ampérage qui va les traverser, je compte les changer pour un calibre plus gros.
Niveau puissance on est assez limité sur des roues de cette taille, 500W par roue c’est déjà pas mal mais il y a moyen de débrider en changeant le couplage des phases. Je verrai ça plus tard après avoir testé à 500W.
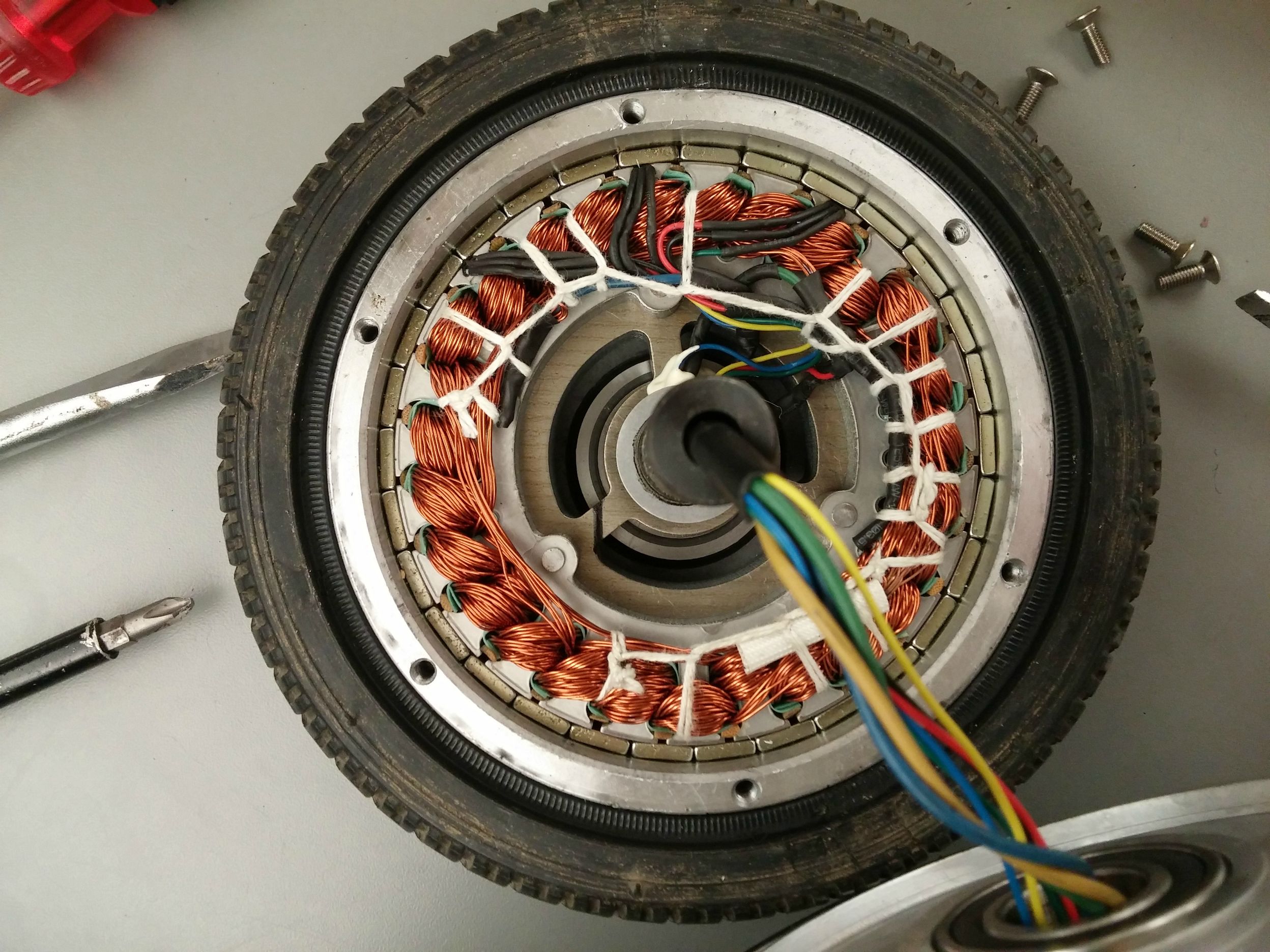
Les moteurs sont de type « Brushless » (= sans charbons) avec 3 capteurs hall pour que le contrôleur connaisse la position angulaire du moteur pour de meilleurs performances.

Par rapport à mon montage, les rondelles anti-couple ne conviennent pas, donc j’ai fabriqué des platines anti-couple, à la main. Elles font 6mm d’épaisseur.
Les plats servent à empêcher l’axe de tourner sur lui-même, ce qui ferait que le moteur tourne dans le vide par rapport au trike.
Il a fallu agrandir le diamètre de fixation de l’axe qui de base est de 12mm pour les roues de kart, l’axe des roues moteur est de 16mm. Perçage également d’un trou borgne M8 pour bloquer la pièce anti-couple.
La platine anti-couple montée.
Les roues montées sur le trike.
Le critère impératif que j’avais était d’avoir un moyeu simple, pour avoir la même fixation que les roues de kart, sans qu’il y ai l’axe à dépasser de l’autre côté, autrement il aurait fallu modifier le cadre du trike.

J’émets des doutes sur la longévité des platines anti-couple, j’aurais peut-être à revoir la conception.
L’écrou arrive juste au bord de l’axe, mais il y a assez de portée pour avoir un bon serrage.
Comparaison des roues avec celles de kart.
Les roues moteur sont moins large et rendent le trike un peu moins large, plutôt bien pour se faufiler à plus d’endroits !

Transfert des bouchons de valves dorées pour récupérer du « bling bling ».
La pression maximale des pneus (en nylon) est de 2,1bar, mais 1,5bar suffit déjà pour ne pas qu’ils s’écrasent sous le poids.
Par contre gros soucis avec les bandes plastique, les pneus sont plus grands ! En gros le diamètre extérieur du pneu (dégonflé) fait le diamètre extérieur des bandes plastiques. J’ai quelques pistes pour trouver une solution à ce problème.
Cet article t’a apporté des informations, des idées ou inspiré ?
Fais un don pour continuer de profiter du contenu de ce site.

2 réflexions sur “[E-Drift Trike] La motorisation”